- · 《科技风》栏目设置[05/29]
- · 《科技风》数据库收录影[05/29]
- · 《科技风》收稿方向[05/29]
- · 《科技风》投稿方式[05/29]
- · 《科技风》征稿要求[05/29]
- · 《科技风》刊物宗旨[05/29]
来稿应自觉遵守国家有关著作权法律法规,不得侵犯他人版权或其他权利,如果出现问题作者文责自负,而且本刊将依法追究侵权行为给本刊造成的损失责任。本刊对录用稿有修改、删节权。经本刊通知进行修改的稿件或被采用的稿件,作者必须保证本刊的独立发表权。 一、投稿方式: 1、 请从 我刊官网 直接投稿 。 2、 请 从我编辑部编辑的推广链接进入我刊投审稿系统进行投稿。 二、稿件著作权: 1、 投稿人保证其向我刊所投之作品是其本人或与他人合作创作之成果,或对所投作品拥有合法的著作权,无第三人对其作品提出可成立之权利主张。 2、 投稿人保证向我刊所投之稿件,尚未在任何媒体上发表。 3、 投稿人保证其作品不含有违反宪法、法律及损害社会公共利益之内容。 4、 投稿人向我刊所投之作品不得同时向第三方投送,即不允许一稿多投。 5、 投稿人授予我刊享有作品专有使用权的方式包括但不限于:通过网络向公众传播、复制、摘编、表演、播放、展览、发行、摄制电影、电视、录像制品、录制录音制品、制作数字化制品、改编、翻译、注释、编辑,以及出版、许可其他媒体、网站及单位转载、摘编、播放、录制、翻译、注释、编辑、改编、摄制。 6、 第5条所述之网络是指通过我刊官网。 7、 投稿人委托我刊声明,未经我方许可,任何网站、媒体、组织不得转载、摘编其作品。
科技瞭望台:更高阶的自动驾驶用到了这些技术
作者:网站采编关键词:
摘要:上个月,一段搭载华为自动驾驶ADS系统的极狐量产电动车路试视频走红网络,视频中展示该车在极为复杂的路况下仍旧能实现自动驾驶功能,车辆所实现的更高阶自动驾驶成为了核心关
上个月,一段搭载华为自动驾驶ADS系统的极狐量产电动车路试视频走红网络,视频中展示该车在极为复杂的路况下仍旧能实现自动驾驶功能,车辆所实现的更高阶自动驾驶成为了核心关注点。
在众多厂商入局的电动车行业,自动驾驶很可能会成为未来电动车的核心竞争力之一。目前自动驾驶技术都用到了哪些技术?未来自动驾驶技术会怎么发展?自动驾驶技术有可能成为接下来电动车行业的焦点之一。
自动驾驶也有分级
我们先来了解下目前自动驾驶都有哪些类型。根据国际自动机工程师学会(SAE)划分的标准,自动驾驶拥有从L0到L5五个级别。L0需要人类全程驾驶,车辆能够提供有限的提醒,比如盲点监测提醒。L1能够实现转向或者加减速其中一项功能。L2则是有一定的自动化驾驶功能,同时支持转向和加减速功能,而驾驶员需要完成其余操作。
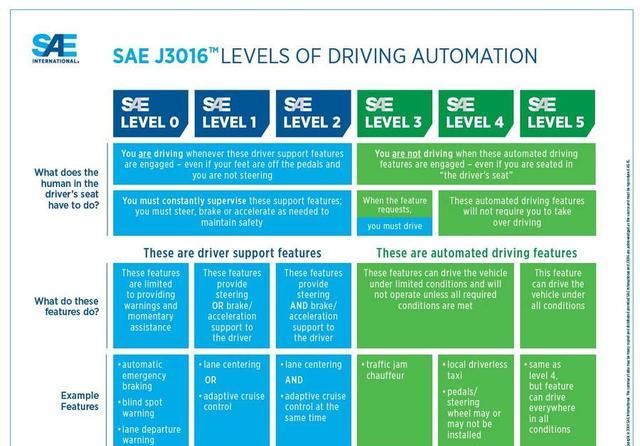
L3级别的自动驾驶与上面几个级别完全不同,L3能够实现条件自动驾驶,车辆完成驾驶操作,不过驾驶员仍旧需要关注路面动态,随时准备接管。L4则是高度自动化驾驶,在限定道路和环境条件下,可以由自动驾驶完成所有操作。
简单来说,L3级是自动驾驶的一个转折点,带来质的提升。目前有部分厂商对L3、L4级别的自动驾驶进行了尝试,预计未来车辆所搭载的自动驾驶功能更多是L3级别以上。
从路测的情况看,搭载华为自动驾驶ADS系统的极狐电动车已经实现类似L4级别的自动驾驶。最近也有不少科技企业宣布涉足造车行业,在自动驾驶方面,科技企业可能会有更大优势。
自动驾驶有视觉派激光雷达派
要想实现自动驾驶,车辆需要具备环境感知能力。在车辆环境感知层面,目前技术路线大概可以分为视觉派和激光雷达派两种不同路线,这两种路线都会采用多传感器混合感知方案,只不过核心实现形式有所区别。
视觉派自动驾驶主要以摄像头视觉识别为主,摄像头+毫米波雷达就是很常见的组合方案。通过摄像头识别物体、场景,毫米波雷达负责提供距离、速度等参数,通过这些传感器组合捕捉到车辆位置以及外部环境信息,共同实现车辆的感知能力。

据了解,特斯拉采用8个摄像头+1颗160米测距毫米波雷达+12颗超声波雷达组合,特斯拉使用的感知方案可以看做是比较典型的视觉派自动驾驶。
视觉派的工作原理其实很容易理解,就是跟人眼感知环境类似。通过车载摄像头捕捉到现实环境的2D画面,然后利用算法构建出3D环境地图,车辆能够实时感知周围环境情况。
视觉派的实现方式虽然相对简单直接,但对算法要求非常高,算法需要对获取到的2D图像中的每一件物体进行准确的识别才能构建出可靠的3D地图,地图的可靠性直接关系到自动驾驶的最终效果。
视觉派自动驾驶的优点是整套硬件配置组合简单,成本相对更低。神经网络图像识别算法在视觉派自动驾驶中起到至关重要的作用,海量的路测数据可用于神经网络训练,可以改善环境感知数据精度不足等问题,提供更准确的场景识别能力。
另外一种激光雷达派自动驾驶就能有效提升场景识别的准确度。激光雷达派一般会采用激光雷达+毫米波雷达+摄像头的混合感知方案,与视觉派主要区别在于增加了激光雷达。

激光雷达其实大家应该不会陌生,去年推出的iPhone 12 Pro、以及iPad Pro 2021上面都配备了激光雷达,通过这颗雷达可获取到更加精准3D深度信息,可用于3D建模等场景,电动车所搭载的的激光雷达也是利用了类似的特性。

激光雷达可以主动发射出大量不可见的激光束,遇到物体时反射回来,结合光速和返回时间,就能实时计算出车辆与物体的距离、速度等,构建出一幅十分精确的3D空间地图,精确度远高于摄像头所获取到的2D图像信息,更加可靠。
上面提到的毫米波雷达工作原理和激光雷达类似,不过各自都有擅长的方面。毫米波雷达可以获取到较为准确的相对速度、距离等信息,但无法实现精确的3D建模。毫米波雷达在汽车上使用的时候,通常还会过滤掉静止的物体,无法实现全面的探测。不过在雨天、雾霾等恶劣天气下,毫米波雷达仍旧能保证比较好的探测效果,可以作为激光雷达的互补。
通过激光雷达+毫米波雷达+摄像头的组合,能够让电动车拥有更加精准的空间感知能力,并且在不同天气下也能保证可靠性。上面提到的这些都是自动驾驶汽车的空间感知能力,硬件部分主要通过雷达+摄像头的组合,获取到环境空间的数据,让汽车能够实时理解所处的环境动态。
文章来源:《科技风》 网址: http://www.kjfzz.cn/zonghexinwen/2021/0518/1315.html
上一篇:吉利与孚能科技合作赣州动力电池(一期)项目
下一篇:科技之光 点亮博物馆的未来